Magnetorheological Damper

The Need for Adaptive Damping
As tyres become ever lower in profile and roads deteriorate, ride comfort becomes a double-edged sword if a car is also to have the sharp responses drivers desire. Various active damping systems have promised an answer, and none has been more impressive than Delphi’s MagneRide, the magnetorheological damper system used by Audi, Ferrari, and several other major manufacturers.
Current car suspension systems represent the result of a very long development. However, fundamentally, suspension systems remain quite crude. Steel springs support the body, with a variety of linkages used to maintain the wheels in a helpful geometry during their movement. To prevent the springs simply oscillating once they have been deflected, dampers (“shock absorbers”) are used to stop the spring continuing to bounce. The resistance to motion that the wheel encounters is therefore very much dependent on the spring rate and the speed and stroke of damper movement.
As a result, frequent trade-offs are required in suspension design. For example, soft springing and light damping can provide excellent vibration isolation, but such a system will bottom out frequently on real-world bumps. Good shock reduction is achieved with a relatively stiff, highly damped system, but on smooth roads, the stiffer the suspension, the better the handling – an approach that is unacceptable on cars that must negotiate bumpy roads.
While active suspensions – where the entire car’s mass is supported by hydraulic or pneumatic rams – were once seen as the answer, the complexity, fail-safe requirements, power consumption, and weight of such systems have slowed their development to a crawl. Magnetorheological dampers represent the answer to the compromise between drivability and comfort. MR damper systems can actively change their damping abilities quickly enough that dive and squat, roll and pitch can be compensated for, in addition to being able to alter their behaviour to suit the road and driving style.
Development History
General Motors (in partnership with Delphi Corporation, Delphi Automotive Systems, a branch of GM) developed this technology for automotive applications. It debuted in both Cadillac (Seville STS, build date on or after 15/1/2002 with RPO F55) as “MagneRide” and Chevrolet vehicles (all Corvettes made since 2003 with the F55 option code) as part of the driver-selectable “Magnetic Selective Ride Control (MSRC)” system in the 2003 model year. Other manufacturers have licensed the technology for their own vehicles.
These systems are available from OEMs for several vehicles, including the Acura MDX, Audi TT and R8, Buick Lucerne, Cadillac CTS-V, DTS, XLR, SRX, STS, Chevrolet Corvette, Camaro ZL1, Ferrari 458 Italia, Ferrari 599GTB, Ferrari F12 Berlinetta, and Holden HSV Commodore.

These systems were originally produced by Delphi Corporation and are now manufactured by BWI Group and LORD/automotive-suspensions.xml) under the proprietary name MagneRide. As of 2007, BMW manufactures cars using their own proprietary version, while Audi and Ferrari offer Delphi’s MagneRide on various models. Porsche introduced magnetorheological engine mounts in the 2010 GT3 and GT2. At high engine revolutions, the magnetorheological engine mounts stiffen to provide more precise gearbox shifter feel by reducing relative motion between the powertrain and chassis/body.
Driver Modes and Response
As a continuously adaptive system, it adjusts the damping characteristic to the profile of the road and the driver’s gear-shifting habits within just a few milliseconds. Using magnetic fields, MagneRide adjusts the firmness of the dampers to the current driving situation within a fraction of a second. It also gives the driver a choice of basic settings for either a more comfortable or a sportier drive.
In the normal mode – when the oil is more viscous and the degree of damping less pronounced – the car rolls surprisingly smoothly, ideal for long-distance driving or uneven road surfaces. In Sport mode, by contrast – when the oil is less viscous – the car reveals an extremely dynamic character manifested by a firm grip on the road surface. Rolling movements are suppressed even more effectively than in the normal setting, and steering response is further improved.
The Science of Magnetorheological Fluids
Magnetorheological fluids and their close relative, electrorheological (ER) fluids, have been around since the mid-1940s. The concept has a complex name but involves a principle that is quite simple to understand.
A control unit computes the optimum damping force for each driving situation, using information from wheel travel sensors and communication with other systems such as steering and ESP.
Since no mechanical parts must be moved, the MR damper responds extremely quickly. The damping force depends only on the power applied to the magnetorheological fluid and can be adjusted up to 1,000 times per second. Thanks to variable control of the power, the damping force can be set infinitely. This means the magnetorheological dampers respond almost in real time with great sensitivity to impulses from the road.
How MR Fluid Works
Rheology is the science that studies the deformation and flow of materials. Rheological fluids have flow characteristics that can be changed in a controllable way using electrical current or a magnetic field. Depending on the base fluid and the strength of the electrical current or magnet, the fluid’s viscosity can be varied from thinner than water to almost solid, and any stage in between. The fluid’s response is instantaneous, completely reversible, and extremely controllable.
Electrorheological (ER) fluid changes viscosity when an electric current is applied directly to the fluid itself. Despite extensive research and development, ER fluid is still far from ready for practical applications.
Magnetorheological (MR) fluid has shear strength about 10 times stronger than ER fluid. Both can use oil, silicone, water, or glycol as the base fluid, and both contain polarisable particles suspended in the fluid. The key difference is that ER fluid uses particles that polarise when directly exposed to an electric current, while MR fluid uses somewhat larger particles of iron that polarise when surrounded by a magnetic field.
The typical MR fluid particles are soft iron spheres or ellipsoids measuring 3 to 5 microns (3 to 5 thousandths of a millimetre) in diameter. Depending on the application, the fluid will be 20 to 40 percent saturated with iron particles, and other additives control particle settling, mixing, fluid friction, and viscosity. Nanoparticles are covered with protective polymeric macromolecular coatings, called surfactants (surface-active agents), that prevent direct contact between nanoparticles and create repulsive forces between them.
Operating Modes
MR fluid can be used in three different modes: shear mode, squeeze mode, and valve mode.
In shear mode, a very thin layer of MR fluid (0.15-0.3 millimetres) is placed between two electromagnetic plates, which are then slid relative to one another. This method can be used for the production of clutches and brakes.
In squeeze mode, the plates are pushed toward one another rather than slid. This approach can be used for damping very small movements.
Of most interest for suspension applications is valve mode. In this arrangement, MR fluid flows from one reservoir to another through a small-diameter passage. If the passage is subjected to a variable-intensity magnetic field, the amount of fluid able to flow is altered. In effect, the fluid behaves as though the opening changes in size. This approach is used in MR fluid damper design.
Inside the MR Damper
The strength of the bonds between the magnetised iron particles causes the viscosity of the fluid to apparently increase. The magnetised fluid is not, technically, more viscous, but it is more resistant to passage through the restrictions in the damper because the concentration of magnetised fluid forms a kind of deformable plug.
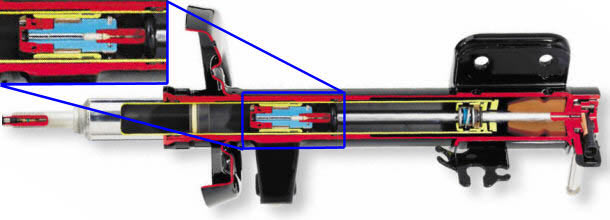
When a magnetic field is applied to a coil – by means of a pulse delivered by a control unit – the micron-sized particles dispersed inside the oil (basic synthetic hydrocarbon oil, polymer liquid, mineral oil, or silicone-based fluid) align themselves along the magnetic lines of force, positioned against the direction of movement of the damper. In each monotube damper, a piston contains two electromagnetic coils and two or more small fluid passages through the piston. The electromagnetic coil is integrated into the damper piston so that when energised, the magnetic flux runs exactly transverse to the admission ports. The electromagnets create a variable magnetic field across the fluid passages, and this field can be altered in strength to adjust the damping force in just 100 nanoseconds. When the magnets are off and the piston moves inside the damper body, the fluid travels through the passages freely.
However, when the magnets are turned on, the iron particles in the fluid create a fibrous structure (the so-called magnetoviscous effect) through the passages, aligned with the magnetic field. If the piston moves, the particles, aligned in strings like pearls on a necklace, create flow resistance. If the “necklaces” need to be broken for the fluid to flow, the fluid behaves as though its viscosity has increased. The carrier fluid itself has not increased in viscosity, but the combination of iron and oil behaves in a more viscous manner. This allows the firmness of the dampers to be increased or decreased within a fraction of a second or gradually.
Altering the strength of the current results in an instantaneous change in piston force. If the sensors detect body roll, they communicate the information to the ECU. The ECU compensates by changing the current strength to the appropriate dampers. This alters the damping characteristic much faster than conventional adaptive dampers and provides the right degree of damping force at each individual wheel in every situation.
The greater the energy applied and the stronger the magnetic field, the stronger the “necklace” and the greater the resistance and damping power. The energy is controlled in relation to driving dynamics and road impulses. In theory, the viscosity of the damper liquid can be changed to an almost solid state similar to plastic or rubber in composition.
System Architecture

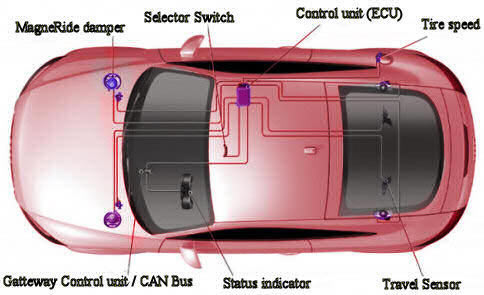
Magnetic suspension is described as the fastest-reacting suspension in the world, as sensors monitor the road surface up to 1,000 times per second and the ECU can make variations within a millisecond.
Each of the four dampers is adjusted individually and independently, ensuring a comfortable ride along various road surfaces. Magnetic suspension reduces vibrations, bouncing, noise, and body roll very effectively at any speed. The reduction of body roll may reduce the need for anti-roll bars. Although this type of suspension offers a very comfortable ride, sport settings can be applied for performance vehicles. Low energy requirements are another benefit – on average, a damper requires just 5 watts of electrical power (25 watts at maximum).
Magnetic dampers are designed with similar dimensions and connection points to other types of dampers, so they are usually attached to the chassis similarly to a coil-spring suspension.
Control Algorithms
A magnetorheological car damper is controlled by algorithms specifically designed for the purpose. There are plenty of alternatives, such as Skyhook or Groundhook algorithms. The idea of the algorithms is to control the viscosity of the magnetorheological fluid with electric current in the best possible way. The control module uses suspension height data from position sensors at each corner. With throttle position sensor (TPS), transmission and wheel speed data from the Powertrain Control Module (PCM), the suspension controller can predict lift and dive at each end of the car and operate the dampers to counteract it. With data from a steering wheel position sensor, a two-plane acceleration sensor, and a yaw rate sensor, the dampers can be operated as needed to control body roll during any manoeuvre. The system also checks body movement during antilock brake system (ABS) operation. The control module constantly monitors yaw, pitch, roll, and heave, continuously adjusting the dampers.
This is a semi-active suspension system. In addition to its main function of keeping the wheels in contact with the road, it can check body motions and, within certain limits, adjust weight bias at each corner by preventing suspension compression. But it is a reactive system, not proactive, and cannot extend the suspension to make the car lean into a turn. Still, it provides a significant amount of increased control with base settings tuned for a more comfortable ride.
Aftermarket Availability
This technology is not yet available in the aftermarket, though some are working on it. The cost is currently prohibitive. Not only is the fluid expensive, but the damper computer control system must be completely integrated with the car and its ECU. The hardware is manageable, but the software that makes the system work takes the longest to develop at the greatest cost. Because of modern car system integration, implementing an aftermarket magnetic damper system and interfacing it with an existing car system is very difficult.

Some systems for competition use are available on the aftermarket. One example is the “SDS” (Selective Damping System) MagneShocks for oval track and road racing. This system allows suspension adjustment without changing the dampers themselves during setup, effectively providing hundreds of different damper settings in one set. There are 50 different pre-programmed rebound force-velocity curves and 50 compression curves (2,500 different possible combinations) to exactly tune for every conceivable track condition. Once a setting is selected, there is no further adaptability to road conditions. The MagneShock comprises four components: a controller box, four dampers, a programmer box, and a selector switch in the cockpit for manual “in-race” adjustments.
DIY Magnetorheological Fluid
It is possible to make a simple MR fluid at home. Mixing powdered iron filings with a thick liquid like corn oil produces a basic MR fluid. Hold a magnet nearby and the iron bits line up end to end, forming a rigid lattice that stiffens the mixture. Remove the magnet and the fluid relaxes again.
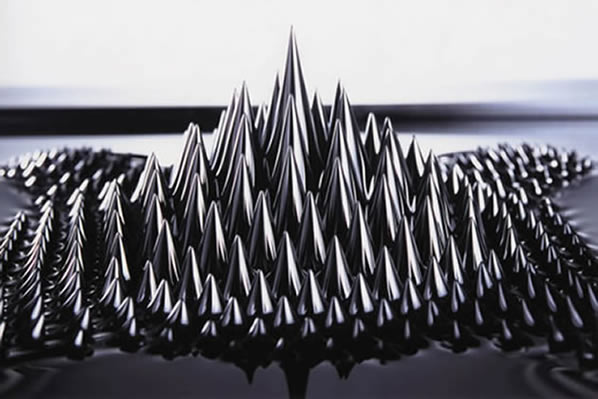
Placing a small amount of MR fluid on a plate with a magnet underneath produces a striking effect. The interaction of the magnetic field, the surface tension of the ferrofluid, and gravity results in the formation of stable spikes of liquid. The spikes are still liquid – touching one simply leaves an oily finger – but if the magnet is stationary, they look like a solid sculpture.
The stronger the field, the smaller the spikes. A weak field from a ferrite magnet produces just a smooth mound with a few spikes where the field is strongest, but the spikes become much finer with a stronger neodymium magnet.